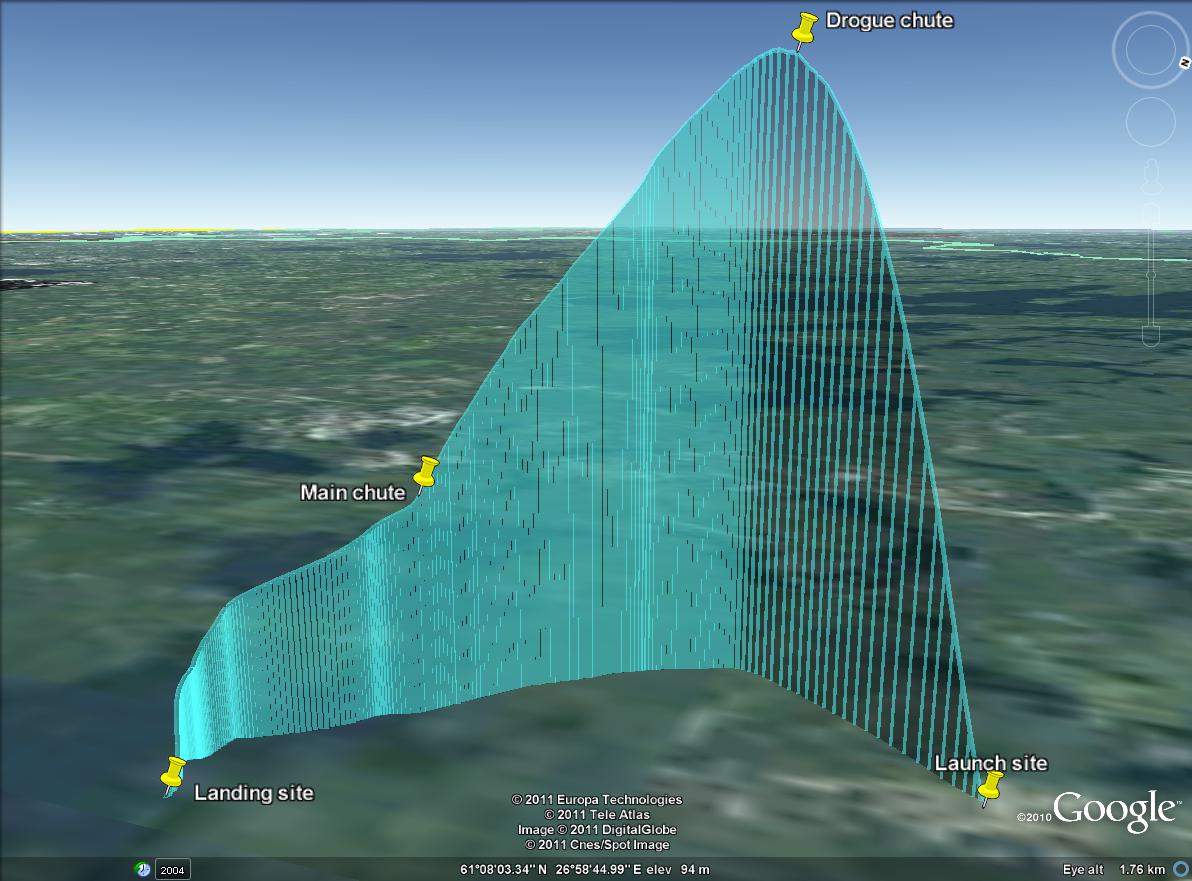
Screenshot from Google Earth,
download KMZ file.
This page is about the launch held in February 2011. For the latest launch info, see the main page.
Telemetry • Photos • Audio • IRC
Iso-Haisu ("Big Skunk") is a hybrid rocket project of the Finnish Astronautical Society. The hybrid rocket contains two GPS units, three barometric altitude indicators, a 2D accelerometer unit and a temperature sensor as telemetry payload. Most of this data is streamed to the ground base in real-time via a radio link, and from there onwards to this Internet server via a GSM connection.
This is an experiment on how to stream live telemetry data not only from the rocket to the ground station, but how to stream it to the Intenet and visualize it efficiently in real time.
The following data is available from this page in real-time:
We're in the progress of extracting and going through all of the videos on photos. Here's a first collage of the onboard video:
Almost all systems worked incredibly well this time. We received live telemetry until landing, viewers from around the globe were able to follow the flight in Google Earth and the videos are spectacular.
The only things that went wrong was the altimeter altitude in the live telemetry got screwed up, which caused the text-to-speech telemetry reporting to go a bit wrong, and one (out of seven) on-board camera stopped recording before the flight. From the data it's also evident that the SkyTraq GPS chipset was able to maintain a correct position throughout the flight, but the SiRF chipset went completely haywire due to the rapid altitude change. The trajectories are visible in the KML file below. The final flight altitude was 2350 meters.
The active roll control also worked correctly this time. In the videos you can see it controlling the roll, adjusting the roll rate to maintain zero roll. At the end of the flight some aerodynamic forces caught a resonant frequency of the PID controller and it started osciallating - you can see it in the video as the wild 180 degree oscillation back and forth. More investigation is needed to find out why this happened and how to prevent it in the future.
Our launch window is on Wednesday 2nd of March 12.00-16.00 EET (10.00-14.00 UTC). We will try to launch the rocket as early in the window as possible, but it may be delayed in case of technical problems or uncertain weather.

The rocket is a HyperLOC 1600 model with a length of 270 cm, diameter of 14 cm and launch mass of approximately 14 kg. It is powered with a HyperTEK L540 motor. The estimated flight altitude is 2300 meters.
The rocket contains an experimental active roll-control system, where a flight computer measures the roll of the rocket from the Earth's magnetic field, and controls a flap on one of the main fins to cancel out the roll. This data is unfortunately not available in the real-time telemetry.
The flight trajectory is visualized in real-time in Google Earth both on the launch site and on the Internet. Open the link below in Google Earth and double-click on Realtime Flight to follow the flight.

» Flight trajectory in Google Earth (result of real-time tracking)
Note: The data should reload every two seconds, which you can see by the "throbbing" of the folder icon (displayed on the right). If the refreshing stops, right-click on Realtime Flight and select Refresh.
Below you can see approximately what to expect to see in real time during the flight. The data for the demonstration was generated based on a previous flight trajectory (landing has been sped up).
» Demonstration flight in Google Earth
Most recent photos snapped and shared in real time. The thumbnails below are automatically refreshed once per minute. (Sorry, no video over a 5 kB/s link.)
The radio communications of the launch team is streamed real-time as a live OGG stream (communication is mainly done in Finnish). The stream also contains the real-time speech synthesis heard on loudspeakers during the flight explaining the current altitude, maximum altitude and bearings during descent.
You need a player capable of playing OGG streams to listen in, such as WinAmp, VLC or ogg123.
»
Playlist file (recommended)
»
Direct stream
Note on latency: Most programs buffer live streams a specific amount before starting playback. Since the stream is very low bandwidth, this may cause a 30-60 second latency in the audio heard. Normally this isn't an issue, but during the flight the audio will lag behind compared to the real-time telemetry plotted on Google Earth.
To fix the issue, you need to configure your player to have a minimal buffering amount. This will typically result in 4-5 second latency caused by encoding and network latencies.
|
WinAmp: Select Menu → Options → Preferences... |
ogg123: The following parameters have been found optimal for playing with ogg123: ogg123 --audio-buffer 1 -b 1 -p 1 -v http://eetu.tunk.org:8000/haisunaata.ogg |
For you to be able to talk back to the launch team we have a dedicated IRC channel up during the launch: #haisunaata @ IRCnet
» Webchat (select "#haisunaata" as the channel)
